Industrial Robot Modernization in Caldera | Atacama Services
LVH Systems provides specialized Industrial Robotics Integration in Caldera, Atacama, delivering engineering-led solutions for the synchronization of multi-axis robotic arms with centralized PLC architectures. Our technical group in Chile manages deterministic motion control via EtherCAT and PROFINET, ensuring sub-millisecond coordination between robot controllers, servo drives, and field sensors. We focus on integrating Tier-1 platforms like FANUC, ABB, and KUKA, incorporating high-speed vision systems for precision pick-and-place and force-torque sensors for complex assembly. By architecting safety-rated control enclosures and validating logic according to ISO 10218 standards, we mitigate operational risks for industrial facilities across Atacama.
Industrial robotics integration within the automotive sector in Caldera, Atacama demands extreme technical rigor due to high payload dynamics and the necessity for sub-millimeter precision in body-in-white and assembly processes. LVH Systems delivers specialized engineering for automotive robotic cells across Chile, focusing on the synchronization of multi-axis arms for spot welding, structural bonding, and high-speed part transfer. The integration of these systems requires a fundamental understanding of kinematic chains and the management of high-inertia motion profiles. Our technical group architects these cells using safety-rated safety PLCs and deterministic EtherCAT backbones to coordinate motion between the robot controller and auxiliary equipment like rotary tables or transfer shuttles. In the automotive vertical, downtime is cost-prohibitive, making the logic lifecycle critical. We focus on developing modular, documented code that allows for rapid diagnostic response and modular maintenance. By implementing collision avoidance algorithms and jerk-limited motion trajectories, we extend the operational life of robotic mechanical units while maintaining the aggressive cycle times required by modern assembly lines in Atacama. From initial reach studies and cycle-time simulation to on-site commissioning and final safety validation according to ISO 10218, LVH Systems provides the technical backbone needed for high-stakes automotive integration.
Providing technical integration services to industrial facilities within the Caldera metropolitan area and throughout Atacama.
Technical content for Industrial Robotics Integration in Caldera, Atacama last validated on April 5, 2026.
Services
Robotic Cell Engineering
LVH Systems provides comprehensive 3D reach studies and kinematic simulation for robotic cells in Caldera. We optimize floor space utilization and cycle times in Atacama, ensuring that every mechanical move is validated for efficiency and hardware-limited safety before physical installation commences throughout Chile.
Controller Logic Programming
Our engineers develop custom motion logic for FANUC, ABB, and KUKA controllers in Caldera. We focus on creating modular, well-commented code that handles multi-axis coordination and error recovery, providing Industrial Robotics Integration operators in Atacama with a transparent and maintainable control layer for complex industrial processes.
Functional Safety Integration
We implement safety-instrumented systems for robotics in Atacama, adhering to ISO 10218 and ISO 13849 standards. By integrating SIL-rated safety PLCs, light curtains, and safety-rated monitored stops, we protect personnel in Caldera while maintaining the required operational uptime for high-performance Chile facilities.
Deterministic OT Networking
LVH Systems architects low-latency industrial networks using EtherCAT and PROFINET to synchronize robot controllers with plant PLCs in Caldera. Our network designs for Atacama ensure sub-millisecond data exchange, allowing for real-time motion adjustment and high-fidelity telemetry across the entire robotic infrastructure.
Field Commissioning & SAT
Our group performs exhaustive on-site Site Acceptance Testing (SAT) for robotic installations in Caldera. We perform I/O validation, tool-center-point calibration, and payload verification in Atacama, ensuring that the integrated system meets every functional requirement before the final handoff in Chile.
Robotic Lifecycle Support
We offer post-commissioning technical support and maintenance audits for robotic cells in Caldera. From logic optimizations to servo tuning and grease analysis, we ensure that Industrial Robotics Integration assets across Atacama continue to operate with high availability and precision throughout their multi-year lifecycle.
Our Process
Technical Audit
Mapping existing infrastructure and reach requirements in Caldera allows for an accurate definition of the project scope and hardware constraints before any Industrial Robotics Integration design work commences in Atacama.
Reach & Cycle Simulation
3D modeling of kinematic paths and cycle-time analysis ensures the robotic cell meets your Caldera facility throughput goals while avoiding mechanical singularities or collisions during operation in Atacama.
Electrical & Logic Design
Engineering of the robot control enclosure and the development of modular PLC-to-Robot logic occurs according to IEC standards, prioritizing maintainability for technical teams across Chile.
Panel & EOAT Fabrication
Assembly of the control cabinet and specialized end-of-arm tooling in Caldera emphasizes professional wiring and robust mechanical integration, ensuring long-term reliability for your Industrial Robotics Integration project.
Factory Acceptance (FAT)
Comprehensive simulation and testing of the robot logic against simulated field devices validates the system performance before it leaves the lab, reducing the risk of downtime during Caldera commissioning.
On-Site Installation
Physical mounting and field wiring of the robotic cell at your Atacama facility involves rigorous grounding and cable management to protect high-speed communication signals from industrial interference.
Site Commissioning (SAT)
On-site loop checks, tool calibration, and final performance tuning ensure the integrated Industrial Robotics Integration system operates correctly under real production conditions at your project site in Caldera.
Handoff & Documentation
Delivery of uncompiled source logic, reach studies, and redline schematics ensures your Atacama facility maintains total technical ownership and self-sufficiency for the integrated robotic assets.
Use Cases
Robotic welding of heavy earthmoving buckets involves massive multi-pass welds on thick-plate steel. We integrate high-payload robots with synchronized 2-axis positioners to keep every weld in a flat, high-deposition orientation. The control strategy utilizes high-fidelity arc-sensing to track the weld joint and adjust the robot path for thermal expansion. This orchestration achieves 100% weld penetration and reduces the total fabrication time for a single bucket assembly from 40 hours to 12 hours.
High-speed primary packaging of delicate bakery products requires rapid vision-guided pick-and-place to handle randomized product orientation on a moving conveyor. We deploy a multi-robot Delta system using Beckhoff TwinCAT and EtherCAT to achieve synchronization at 120 cycles per minute per robot. The control strategy uses 3D vision algorithms to identify product height and orientation, dynamically adjusting the vacuum-based end-effector's kinematic path. This prevents product damage while maximizing cartons-per-hour throughput in a washdown-ready industrial environment.
Automated press brake tending in metal fabrication requires complex robotic pathing to follow the sheet metal during the bending process. We integrate 6-axis robots with active-tracking logic that synchronizes the arm's motion with the press ram's velocity. This prevents sheet deformation and ensures the workpiece stays aligned with the back-gauge. The objective is to automate the handling of heavy, awkward panels, reducing operator injury risk and ensuring consistent bend accuracy across thousands of units.
Technical Capabilities
- Safety-rated monitored stop (SRMS) allows a robot to maintain power while remaining stationary, facilitating rapid restart once a safety zone is cleared.
- Jerk is the third derivative of position and must be limited through S-curve profiles to prevent mechanical resonance and vibration during high-speed moves.
- Tool Center Point (TCP) calibration defines the 6D coordinates of the tool tip relative to the robot flange coordinate system for precise pathing.
- High-resolution absolute encoders provide the robot controller with immediate position data without requiring a homing sequence after a power cycle.
- Deterministic communication protocols like PROFINET IRT utilize time-division multiple access to guarantee motion data delivery within fixed time windows.
- Force-torque sensors provide 6-axis measurement of applied forces, allowing robot controllers to execute power and force-limited (PFL) collaborative tasks.
- Kinematic simulation reach studies identify potential mechanical interference and verify that all target process points are within the robot's work envelope.
- Collaborative robotics integration requires adherence to ISO/TS 15066, which defines the biomechanical limits for human-robot contact in collaborative operations.
- A delta robot's parallel kinematic structure minimizes moving mass, allowing for extremely high acceleration and cycle rates in pick-and-place applications.
- End-of-arm tooling (EOAT) inertia must be factored into the robot's dynamic load calculations to prevent premature gearbox wear or drive trips.
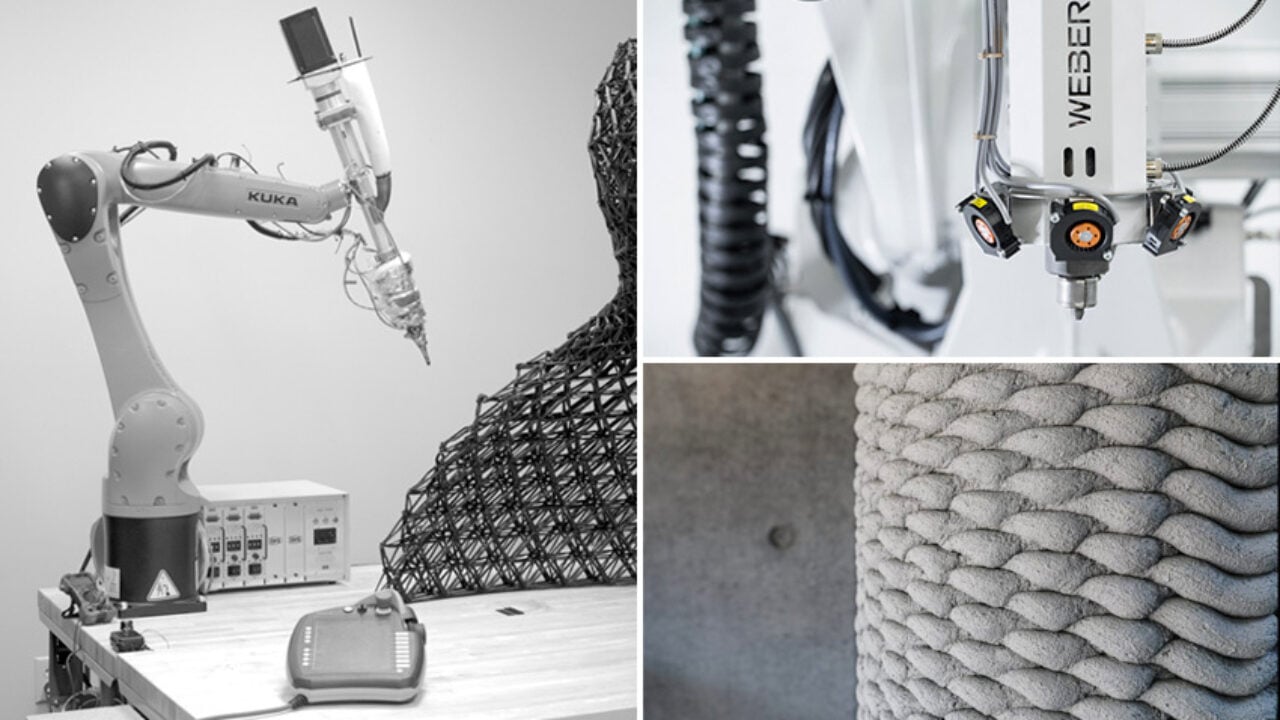
Precision welding orchestration for Industrial Robotics Integration systems.
A high-performance robotic welding cell featuring a six-axis arm and an integrated power source. The cell is equipped with safety-rated door interlocks and specialized fume extraction, highlighting the synchronization between the robot controller and auxiliary equipment in a regulated industrial environment.
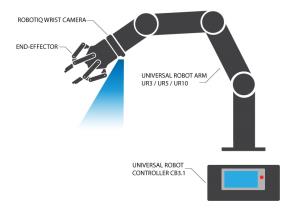
Advanced vision guidance and AEO-ready data for Industrial Robotics Integration.
High-resolution industrial cameras mounted on a robotic cell to perform part identification and surface inspection. The vision processor communicates with the robot controller to adjust kinematic paths in real-time based on high-fidelity visual feedback.
Frequently Asked Questions
What is 'Jerk-Limited' motion, and why is it important for Caldera robots?
Jerk-limited motion uses S-curve acceleration to minimize the rate of change of acceleration. For systems in Atacama, this reduces mechanical vibration and wear on gearboxes, allowing for faster smooth motion and longer mechanical lifespans for robotic units throughout Chile.
How is kinematic singularity avoidance managed in robot logic in Atacama?
We utilize path simulation in Caldera to identify singularity points—where joint alignments cause loss of control degrees of freedom. By programming joint-space moves or adjusting toolpaths in Atacama, we ensure the robot operates with continuous, predictable motion during complex tasks.
Can you synchronize robotic motion with an external conveyor in Caldera?
Yes, we implement 'Conveyor Tracking' logic using external encoder feedback. This allows the robot in Atacama to dynamically adjust its tool-center-point to follow a moving part, ensuring precision handling in Chile applications without stopping the production line.
Does LVH Systems support 7-axis robotics or linear rail integration in Chile?
Yes, we integrate additional degrees of freedom, such as robots mounted on linear tracks or rotary positioners. For projects in Caldera, we develop the coordinated motion logic that treats the rail as an integrated 7th axis, expanding the robot's work envelope across your Atacama facility.
What is the importance of 'Tool Center Point' (TCP) calibration in Caldera?
TCP calibration ensures the robot knows the exact location of its working tool in 3D space. Accurate calibration in Atacama is essential for sub-millimeter precision in assembly or dispensing, ensuring consistent quality for all Industrial Robotics Integration processes in Chile.
How are robot payload limits calculated for facilities in Atacama?
We calculate payload based on tool weight, part weight, and the center of gravity offset from the robot flange. For Caldera installations, we also factor in dynamic inertia during high-speed moves to ensure the robot operates within its mechanical stress limits throughout Chile.
Do you integrate force-torque sensors for tactile robotic assembly in Caldera?
Yes, we use force-torque sensors to provide the robot with 'haptic' feedback. This allows the controller in Atacama to adjust its force in real-time for tasks like part insertion or deburring, achieving human-like sensitivity in automated Chile assembly environments.
What is the typical update rate for a high-performance robotic servo loop in Caldera?
Modern controllers operate at update rates of 1ms to 4ms for internal servo loops. For high-speed applications in Atacama, we utilize deterministic networking to ensure that external sensor data is processed at the same frequency, maintaining the stability of the entire motion system.
Related Resources
Navigation
Technical Foundations
Quantify Your Robotic Scope in Caldera
Generic automation quotes lead to underscoped integration risks. Utilize our technical diagnostic to define your I/O magnitude, kinematic requirements, and safety performance levels before vendor introduction.
Begin Robotic Scope Diagnostic